
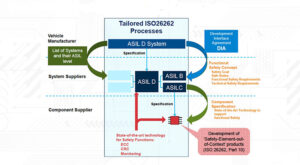
Functional safety, a critical requirement in automotive applications, addresses catastrophic failures from data corruption by attaining Automotive Safety Integrity Levels (ASILs) as per ISO 26262 standard. Contrary to the common perception that only large and powerful system-on-chips (SoCs) incorporate functional safety built around the ISO 26262 standard, MCUs for the next-generation car architectures are increasingly […]
FAQ
Embedded basics Part 1: IEC 61508 functional safety for MCUs
Functional safety is becoming one of the most important features in embedded systems, especially in the automotive and industrial markets, where safety and reliability are critical design attributes. It encompasses the development of a Safety Integrity Level (SIL) according to IEC 61508 functional safety standard for the general industry and an Automotive Safety Integrity Level […]
Four major design considerations for IoT apps secure boot
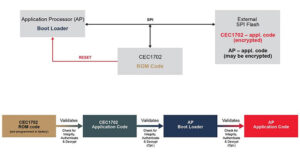
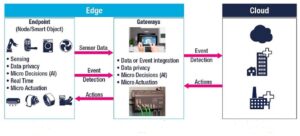
Secure boot, the first line of defense against security breaches in embedded systems, verifies the pre-boot authentication of system firmware using a root-of-trust service and thus safeguards code and data to prevent malicious activities. It’s a critical security measure to protect connected devices like the Internet of Things (IoT) endpoints because most security breaches such […]
Three RTOS basics: What, when and how
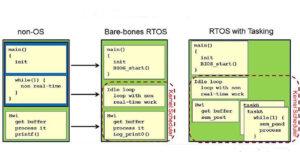
While real-time operating system (RTOS) software is becoming a key feature in the out-of-box support for embedded systems built around MCUs, the overall concept of RTOS is still muddy for many design engineers. So, here is the when and why RTOS solutions are needed in embedded designs. But, before that, what is RTOS anyway, especially […]
The AI-enabled MCUs: Basic design venues
What has the tiny microcontroller got to do with the mighty artificial intelligence (AI) world and its technology offshoots like machine learning and deep learning? After all, the AI designs have mostly been associated with powerful CPUs, GPUs, and FPGAs. Right? While this notion is not far from reality, it’s quickly changing with AI’s journey […]
LiDAR and Time of Flight, Part 4: Circuitry and advances

LiDAR systems and ToF techniques are critical to providing self-driving cars with a detailed picture of the surrounding and is used in many research applications as well. This is the final part of a four-part series on LiDAR systems and ToF techniques. The high-level block diagram of a LiDAR system inherently glosses over the many […]
LiDAR and Time of Flight, Part 3: Emitters, sensors, and scanners
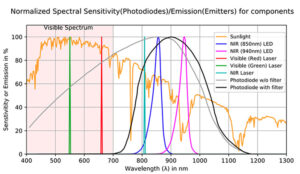
LiDAR systems and ToF techniques are critical to providing self-driving cars with a detailed picture of the surrounding and is used in many research applications as well. This is part three of a four-part series on LiDAR systems and ToF techniques. At the front end of a LiDAR system is the photon emitter and its […]
LiDAR and Time of Flight, Part 2: Operation
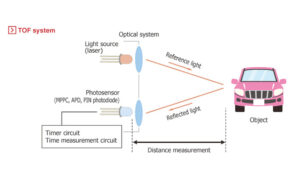
LiDAR systems and ToF techniques are critical to providing self-driving cars with a detailed picture of the surrounding and is used in many research applications as well. This is part two of a four-part series on LiDAR systems and ToF techniques. Just as for radar and sonar, the LiDAR concept is simple but the execution […]
LiDAR and Time of Flight, Part 1: Introduction
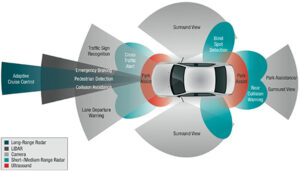
LiDAR systems and ToF techniques are critical to providing self-driving cars with a detailed picture of the surrounding and is used in many research applications as well. Many of the major automobile vendors, along with well-known non-auto companies such as Google, are devoting major resources to developing autonomous vehicles (often called “self-driving cars”). These vehicles […]
What is the LoRaWAN certification process?
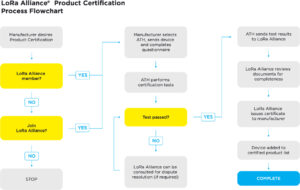
The Internet of Things (IoT) is on the upward trajectory and seeing applications in an increasing number of sectors or industries. In these IoT applications, the IoT devices will be installed in remote or hard-to-reach locations and expected to operate for a long time without repair. Because the IoT devices collect and integrate many different […]