
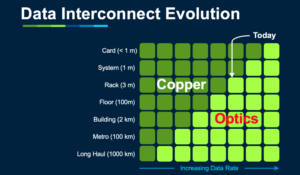
Communication protocols and protocol stacks like peripheral component interconnect express (PCIe), compute express link (CXL), Aeronautical Radio, Inc. 818 (ARINC 818), Joint Electron Device Engineering Council (JEDEC) standard 204/B/C/D (JESD204B/C/D), Fibre Channel and so on, are formal descriptions of digital message formats and rules. They are separate from the physical transport layer, although some protocols […]
FAQ
How can TinyML support sustainability on the edge?

Sustainability can be in the eye of the beholder. That’s certainly true for the question of how can TinyML (tiny machine learning) support sustainability on the edge? From a societal perspective, The United Nations Educational, Scientific and Cultural Organization (UNESCO) believes that TinyML can help to achieve its Sustainable Development Goals (SDGs). From an engineering […]
RFID upgrade pushes “ancient” pneumatic-tube system into the 21st century: Part 2

Adding simple RFID tags to hospitals’ widely used pneumatic-tube systems has dramatically improved performance without needing a system rebuild. Wireless solves the problem — and does more Modern electronic technology has reinvigorated the pneumatic tube system to do more and do better without requiring more tube pathways. This can apply to upgrading an existing installed […]
RFID upgrade pushes “ancient” pneumatic-tube system into the 21st century: Part 1

The addition of simple RFID tags to hospitals’ widely used pneumatic tube system has dramatically improved performance without needing a system rebuild. Although email and the web have greatly diminished the need for physical mail in many situations, it’s important to remember that there are many real-world scenarios where a tangible, physical object must be […]
Teardown: Amazon 4th generation Echo Dot

One of the latest incarnations of the Echo Dot boasts premium sound and an ability to pair up with Fire TV devices for a home theater audio experience. Construction-wise, there are usually a few changes from one generation of Echo devices to the next, and sometimes between early and later models of the same generation. […]
RISC-V: The background, the benefits, and the future
by Mark Lippett, CEO of XMOS US developers conceived the revolutionary instruction set architecture (ISA) known as RISC-V in 2010. Grounded in reduced instruction set computer (RISC) principles, it’s a common, open-source, and completely free ISA that can be used to develop software and hardware. These attributes are just part of what makes the architecture […]
MOSA and SOSA join the lexicon of military frameworks: Part 2
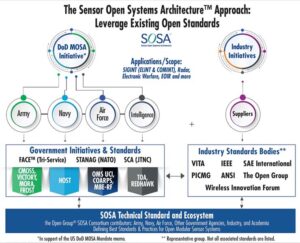
These two military-focused architectural standards provide approaches to system-level development and sensor-centric designs. The previous part of this article discussed the Modular Open Systems Approach (MOSA) Reference Frameworks in Defense Acquisition Programs. This part looks at one realization via the Sensor Open Systems Architecture (SOSA). Q: What is SOSA, anyway? A: (Warning: there’s a lot […]
MOSA and SOSA join the lexicon of military frameworks: Part 1

These two military-focused architectural standards provide approaches to system-level development and sensor-centric designs. The military services have long had a dilemma with respect to technical standards and the long-term viability and compatibility of associated systems. On one side, they would like to be able to leverage the latest, newest technologies for the performance and cost […]
When to use standalone or MCU-hosted Matter platforms
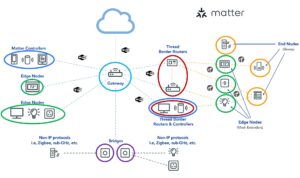
The choice is driven by several factors, including the communications protocol or protocols being used and the device type and location within the local Matter ecosystem. Solution size requirements, powering expectations, and bandwidth needs are some deciding factors when choosing between various Matter platforms. If a MCU platform is used, there’s the added choice between […]
How does Matter support multiple fabrics?

In this context, a “fabric” is a group of networked devices that share the same security domain enabling secure communications within the fabric. Devices in each fabric share the same top-level certificate authority (CA), a Root of Trust determined by the CA, and have a unique (usually 64-bit) identifier called the Fabric ID. To add […]