
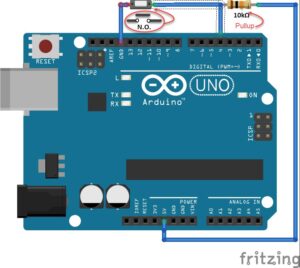
If you want a button or switch as an input on a microcontroller (MCU), you can use a “pullup resistor” so that the input is seen as a logical high when the (normally open) switch or button is closed. A pullup resistor is connected to Vcc, or logical high for your input, and therefore “pulls […]
Training
Top microcontroller threads on EDAboard.com – September
(editor’s note: Intrigued by the problem? Have a question or optional solution? Then click the “Read more” link and follow the conversation on EDAboard.com or log in to EDAboard and participate in the microcontroller forum thread.) Switch statement for PIC microcontroller – I am learning Switch Statement in C. I wrote a code for testing with […]
A beginner’s guide to microcontrollers
by Jon Wilder Time after time I see beginners try to get started in embedded electronics, only to be overwhelmed and not know where to start. Some even make the mistake of trying to write their own code without first gaining a thorough understanding of the microcontroller/microprocessor they’re working with, the programming language they’re working […]
timer 0 and PIC16F628A

by Jon Wilder The on-chip timer on PICs is confusing to some. But, not to worry…it’s probably one of the simplest on-chip peripherals to use on a PIC. In this article, we’ll use the PIC16F628A as our example of why that’s true. Timer 0 (TMR0) is one of three timers available on the 16F628A that is running […]
How To Monitor I2C Communications Through RS232
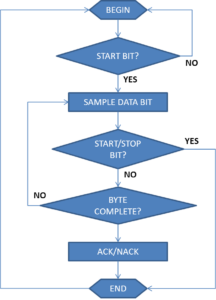
by Electro-Tech-Online member languer In the past when requiring to monitor I2C communications between two devices I would use a logic analyzer. Such monitoring was useful to determine if the I2C communications between devices was properly configured. Even though this is quite useful and efficient, it does require a logic analyzer, with an I2C protocol […]
16 Best Questions to ask Embedded Systems Programmers

Trying to decide if your potential new embedded programmer hire has what it takes? Need a little help with embedded-specific interview questions? Or do you simply want to take a break and have fun with a test? Electro-Tech-Online member known as amol. guilhane07 has compiled 16 questions to ask when recruiting embedded systems programmers. We list […]