
There is an emerging demand for a replacement for today’s global navigation satellite systems (GNSS), and especially for the global position system (GPS) in the U.S. Part one of this three-part FAQ series presented several of the shortcomings of today’s GPS technology and some efforts to augment it and improve its performance. Part two presented a terrestrial-based technology that is already being offered as a substitute for GPS in many applications. This third and final installment looks into the future at possible quantum-based and optical-based position, navigation, and timing (PNT) technologies that could eliminate the need for GPS devices.
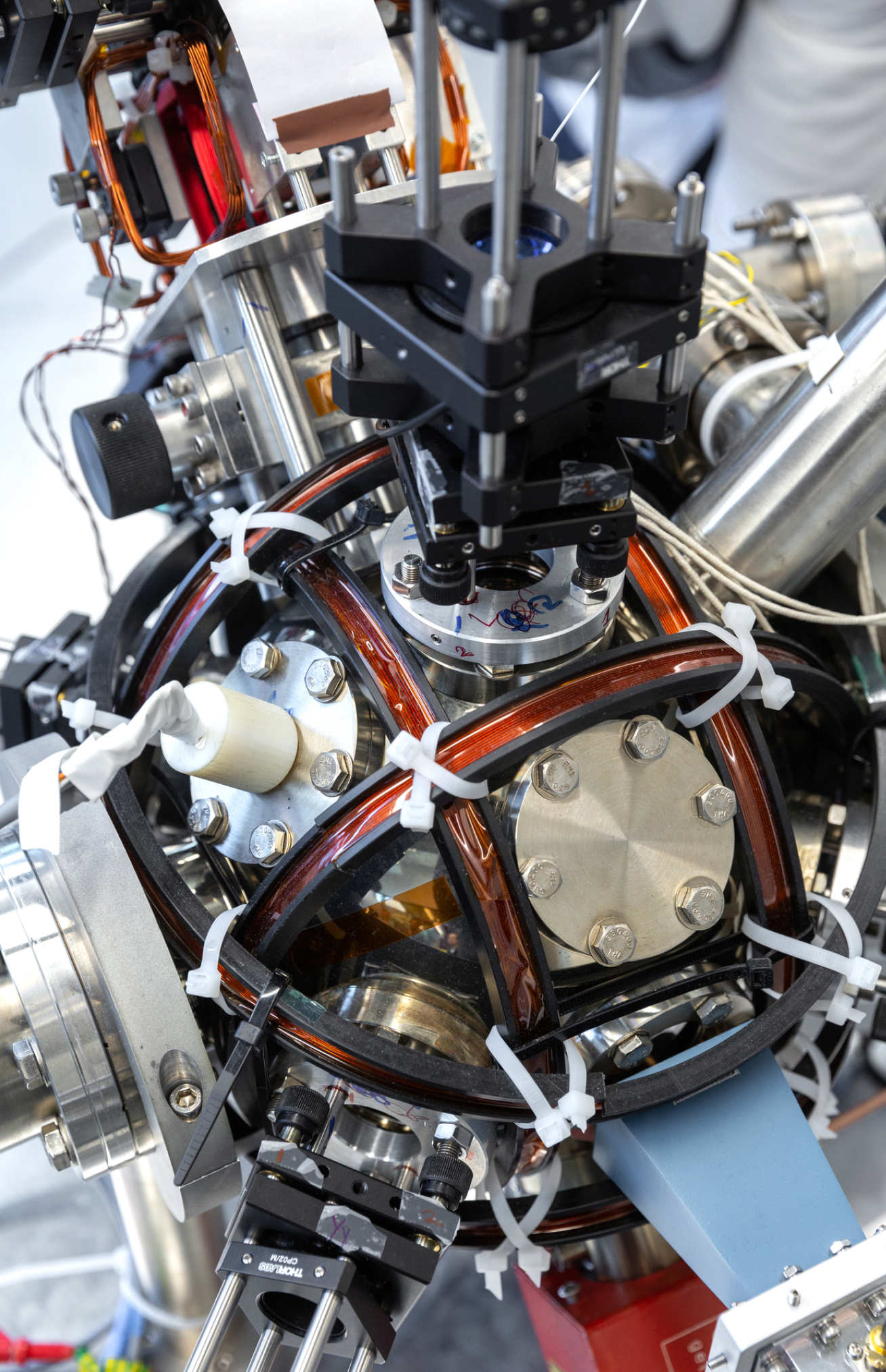
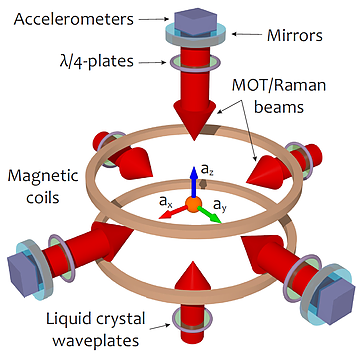
The next generation of inertial sensors may be based on a compact gyroscope and a three-axis accelerometer using new techniques in atom interferometry. Called a quantum compass, it is an instrument that measures relative position using the technique of atom interferometry. It includes an ensemble of accelerometers and gyroscope based on quantum technology to form an inertial navigation unit.
A quantum compass contains clouds of atoms frozen using lasers. By measuring the movement of these frozen particles over precise periods of time, the device’s motion can be calculated. The device would then provide a tamper-proof accurate position in circumstances where satellite navigation is not possible.
The ultimate goal is to build a new autonomous device that can compete with technologies based on global positioning systems without external communication drawbacks for recalibration. The device would then provide a tamper-proof accurate position in circumstances where satellites are not available for satellite navigation, e.g., a fully submerged submarine.
AIG’s (atomic interferometer gyroscopes) and ASGs (atomic spin gyroscopes) use an atomic interferometer to sense rotation or, in the latter case, uses atomic spin to sense rotation with both having a compact size, high precision, and the possibility of being made on a chip-scale. AIGs may compete, along with ASGs, with the established ring laser gyroscope, fiber optic gyroscope, and hemispherical resonator gyroscope in future inertial guidance applications.
The UK’s first quantum accelerometer for navigation has been demonstrated by a team from Imperial College London and M Squared. M Squared developed a universal laser system for cold atom-based sensors that the company has already implemented in a quantum gravimeter. That laser is now also used in the quantum accelerometer built in collaboration with Imperial. Combining high power, exceptionally low noise, and frequency tunability, the laser system cools the atoms and provides the optical ruler for the acceleration measurements.
The quantum accelerometer relies on the precision and accuracy possible by measuring properties of supercool atoms. At extremely low temperatures, the atoms behave in a ‘quantum’ way, acting like both matter and waves. The current system is designed for the navigation of large vehicles, such as ships and submarines. Smaller systems are envisioned in the future.
In France, the joint laboratory iXAtom brings together the knowledge of the French company iXblue — experts in optical gyroscopes, photonics, and inertial navigation — and personnel from LP2N specialized in atom interferometry. This collaboration aims to make technological advances using cold atoms to develop the next generation of inertial sensors for industrial, military, and Space applications, with anticipated improvements in their performance.
In the near future, iXAtom plans to develop a compact gyroscope and a three-axis accelerometer based on new techniques in atom interferometry. The ultimate goal of iXAtom is to build a new autonomous device that can compete with technologies based on global positioning systems without the drawback of external communication for recalibration.
Optical navigation using terrestrial objects
Optical navigation using terrestrial landmarks and mapping has been under development for many years. Terrain Contour Matching, or TERCOM, was a navigation system used primarily by early versions of cruise missiles. It uses a pre-recorded contour map of the terrain compared with measurements made during flight by an on-board radar altimeter. A TERCOM system considerably increases the accuracy of a missile compared with inertial navigation systems (INS). The increased accuracy allows a TERCOM-equipped missile to fly closer to obstacles and generally lower altitudes, making it harder to detect by ground radar.
The limited data storage and computing systems of the time meant that the entire route had to be pre-planned, including its launch point. If the missile was launched from an unexpected location or flew too far off-course, it would never fly over the features included in the maps and would become lost.
DSMAC was an early form of artificial intelligence (AI) that could guide missiles in real-time by using camera inputs to determine location. DSMAC was used in Tomahawk Block II onward and proved itself successfully during the first Gulf War. The system worked by comparing camera inputs during the flight to maps computed from spy satellite images. The DSMAC AI system computed contrast maps of images, combined in a buffer, and then averaged. It then compared the averages to stored maps computed beforehand by a large mainframe computer, which converted spy satellite pictures to simulate what routes and targets would look like from a low level.

An example of a detection algorithm is shown in the flowchart above. This method uses M blocks of data, extracts the desired features from each then models them using a Gaussian mixture model (GMM). After a model is obtained using the data collected, conditional probability is formed for each target in the training database. This method can distinguish between vehicle types (wheeled vs. tracked vehicles, for example).
Since the data was not identical and would change by season and from other unexpected changes and visual effects, the DSMAC system within the missiles had to compare and determine if maps were the same, regardless of changes. It could successfully filter out differences in maps and use the remaining map data to determine its location. Due to its ability to visually identify targets instead of simply attacking estimated coordinates, its accuracy exceeded GPS guided weapons during the first Gulf War.
ImageNav™, developed by Scientific Systems for the US Air Force, is a modern optical navigation system for aircraft. ImageNav is a non-GPS precision navigation software that uses inertial navigation system information to match onboard camera imagery, including electro-optical and infra-red, against stored geo-registered digital terrain elevation data (DTED) to determine the precise location of an air vehicle in flight. It has a terrain database of the area being navigated and matches it with input from video cameras to work out its location.
ImageNav software is multi-threaded and scalable to run on multiple cores. ImageNav uses time-synchronized camera imagery and can accept PGM or PNG images up to 1024×1024 pixels in size and at up to 30 frames per second. ImageNav has been successfully tested on a number of aircraft but could also find uses in self-driving vehicles.
High Tech Celestial Navigation
Mariners have used various celestial navigation techniques since ancient times. Two stars, the local altitude, and a clock are all that’s needed to determine a position using a sextant. Celestial navigation can be surprisingly accurate; if the values are determined to within 1 arc minute, the possible error is about 1 nautical mile, but if the values can be determined to within 1 arc second, the possible error drops to about 30 meters. Today’s advanced optics and high-speed microelectronics can enable celestial navigation with an accuracy of 15 meters, without the need to know the altitude, even in a moving aircraft or missile.
Tracking fast-moving satellites like the International Space Station has helped to improve the accuracy of celestial navigation. Having large numbers of fast-moving objects to get bearings on means that the system, called Skymark, can achieve greater accuracy than slow-moving stars. Skymark uses a database of visible satellites – both working satellites and space junk – and has a claimed accuracy of 15m (49ft), making it almost as good as GPS. And it uses a proprietary stellar horizon refraction algorithm that eliminates the need for a local vertical. Its accuracy depends on knowledge of the atmospheric density profile to provide a refraction estimation that replaces the vertical measurement in earlier celestial navigation systems.
Skymark can correct an emerging problem common to inertial navigation systems when access to GPS is denied: they tend to drift and lose accuracy over time, making them inadequate on their own for long-distance navigation. Skymark provides a system position fix through a unique combination of advanced optics, sensors, and algorithms to triangulate off of known positions of stars and satellites.
Today’s GPS is several decades old. It has received numerous upgrades, and completely new third-generation satellites are currently being launched. However, there’s growing concern that the system may be reaching the limits of its usefulness. To learn more about the limitations of GPS and what is being done to address those limitations, you might enjoy reading part one of this FAQ series, “GPS is a ubiquitous and problematic technology,” and part two, “eLORAN a terrestrial alternative to GPS.”
References:
Automatic target recognition, Wikipedia
ImageNav, Scientific Systems
iXAtom – LP2N and iXblue Cold Atoms joint laboratory, iXAtom
Quantum ‘compass’ could allow navigation without relying on satellites, M Squared
TERCOM, Wikipedia


Leave a Reply