
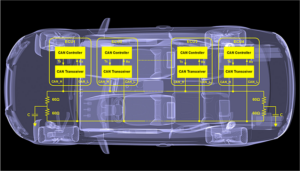
The controller area network (CAN) bus was developed to support the networking of large numbers of electronic control units (ECUs) in automobiles. CAN is implemented using unshielded twisted pair (UTP) cabling, designed for reliability in electromagnetically noisy environments. CAN has evolved significantly since it was first introduced in 1986, along with early ECUs. Today, there […]
Continue to Site