
Data communication over analog signals is a common process. In automation, the data is communicated to and from controllers with several different process instruments. Quality is important as the controllers and smart instruments must communicate over long distances.
Additionally, the data communication between a device and a controller must be dictated by a protocol (i.e. a set of digital message formats and rules). Many communication protocols are used in industrial automation, including As-i, BSAP, CIP, CAN bus, DeviceNet, DirectNet, EtherCAT, EtherNet/IP, EGD, Powerlink, HART, Interbus, Modbus, OSGP, Profibus, MPI, and others.
The HART (highway addressable remote transducer) protocol is one of the most popular for use in industrial automation. Based on the legacy 4-20mA analog instrumentation wiring, the HART protocol uses a pair of wires for data communication between industrial controllers and smart process instruments.
Understanding analog transmission
Computer systems and interfaces use digital voltage signals for data communication. The problem with voltage signals, however, is that they’re affected by wire resistance — which makes communicating voltage signals for data communication over long distances impractical. This is why current loops are typically used in automation.
Since the ‘80s, the 4-20 mA has been the de facto standard in automation wiring. The value of the 4 mA represents a “live zero,” helping maintain a minimum amount of current for the loop-powered instruments.
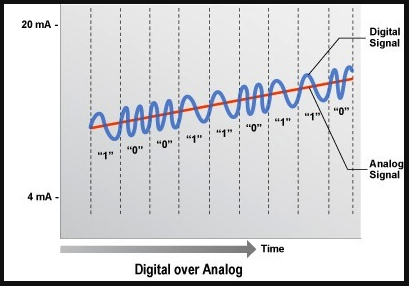
These current loops use analog (continuous) signals for data communication. The digital data is superimposed on a carrier signal (current) using a digital modulation technique. The amplitude-shift keying (ASK), frequency-shift keying (FSK), and quadrature phase shift keying (QPSK) are currently the most commonly used digital modulation techniques.
Understanding the HART protocol
The highway addressable remote transducer or HART is an industrial automation protocol. It’s a global standard for two-way analog communication between smart-process instruments and control or monitoring host systems.
The host system can be a laptop, a handheld device, or an industrial process-control system (PLC/DCS). The protocol is based on the Bell 202 standard and it’s capable of superimposing digital information on the conventional 4-20 mA analog signals using the FSK. This protocol is also maintained by the HART Communication Foundation (HCF) and defines physical connectivity, as well as the commands used by applications.
The HART protocol communicates data at 1200 bps allowing a host to get at least two updates from a smart-field device in one second. The protocol provides two simultaneous channels:
1. The 4-20 mA analog signal – for communicating primary measured values
2. A digital signal that’s superimposed on the analog signal – for communicating additional information
As the FSK signals have an average value of zero, the modulation does not interrupt the carrier analog signal.
The HART is a master-slave protocol that allows data communication in point-to-point or multi-drop mode. Up to two masters (in point-to-point configuration) can share the communication bus, simultaneously. This permits handheld communicators to operate as secondary masters while a control or monitoring system operates as the primary master.
How the HART protocol works
The HART protocol makes use of the FSK. The digital data is represented by two different frequencies. The frequency of 1,200 Hz represents bit 1 and 2,200 Hz represents bit 0.
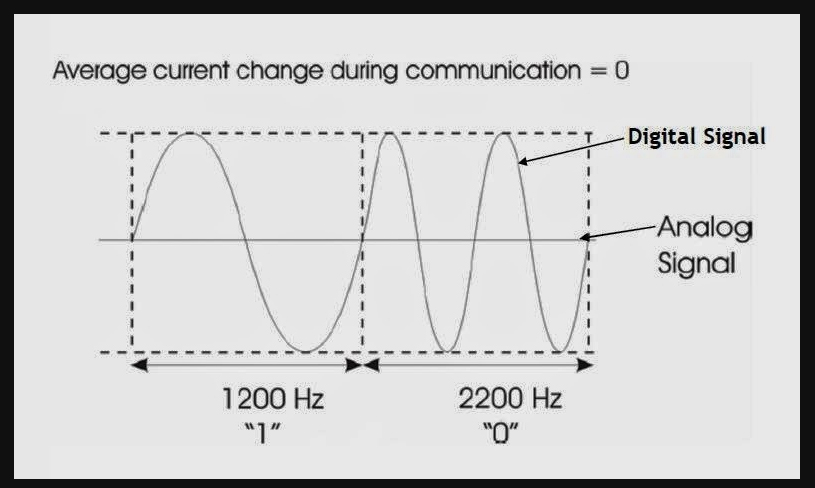
By superimposing two frequencies of direct-current analog signals, the HART provides simultaneous analog and digital communication. The 4-20 mA signal is not affected by the digital modulation.
For this reason, the HART is called a hybrid protocol.
The HART is a master-slave protocol and the entire data communication process is initiated and controlled by the host system. It’s the host device that requests the data from a HART-enabled field device. This field device simply responds to the HART commands according to the protocol.
The HART protocol operates over two wires allowing for 2-way communication between the host controller and the field devices.
There are also wirelessHART solutions available. However, the wirelessHART gateways do not use an analog signal for data transmission. Instead, they use the digital parameters over a wireless carrier wave.
The HART network
HART-enabled devices can operate in one of the two configurations:
- Point-to-point: when the HART communication occurs between a HART-enabled device and a host system. The primary variable (data) is communicated over an analog signal and all additional variables are communicated using a digital signal. The host system can include up to two masters: a primary and a secondary master.
- Multi-point: when multiple HART-enabled devices are connected in parallel to a transmission line. According to the HART v07, 64 field devices can be connected to a HART bus in a multi-drop configuration. These devices use only digital channels for data communication while the analog signal is maintained fixed to the 4 mA. Each device has a unique HART address and no two devices can access the transmission line simultaneously.
The HART protocol
The data in a HART protocol is transmitted in packets. Each message packet contains the following data fields:
Preamble – includes 5 to 20 bytes with the hex value, “FF,” which is transmitted from the host system to the field device(s). Most of the host systems only transmit five preamble bytes. These bytes are transmitted to help the field device synchronize with the data stream.
Start character – after the preamble bytes, a start byte is transmitted from the master (host) to the field device. This byte can indicate one of several values and, often, contains the master number. The start character is the indicator of the beginning of the HART packet.
Aside from the master number, it may contain indicators for the:
- Message format – such as the master-to-slave, slave-to-master, or the burst message from a slave
- Address format – a short or long frame
- Number of bytes in the expansion field
Address – may have 1 to 5 bytes. It contains both a master and a slave address. The indication for the master address is a single bit, where 1 indicates a primary master and 0 indicates a secondary master. The indication of a slave address is a 4-bit polling address in a short frame and a 38-bit unique identifier in the long frame. One bit is used to indicate the burst mode from the slave.
Expansion – may contain 0 to 3 bytes. The number of bytes in an expansion field includes bits 5 and 6 of the start character.
Command – has a single byte that contains a HART command.
- The universal HART commands range from 0 to 30
- The practice commands range from 32 to 126
- The device-specific commands range from 128 to 253
From the HART v06 onwards, the 16bit extended commands for the device families are also supported. These commands begin with the 0x1F as a command byte, followed by a 2-byte command.
Byte count – has a single byte indicating the number of bytes in the status and data fields. It let the receiver field device know when the message packet ends.
Status – is only present in the messages transmitted from a slave to the master. It contains two bytes indicating communication errors, the status of a received command, or the status of the receiver field device.
Data – may contain 0 to 255 bytes. The presence of the data field depends on a particular command. All universal and common practice commands have 33-byte data fields.
Checksum – a HART message will end with a checksum byte. It’s the XOR of all the previous bytes. To detect a communication error, a parity bit is attached to each byte. The checksum byte helps in maintaining the overall integrity of the HART message.

The HART modes
The HART protocol can operate in two modes:
- Master-slave mode: where the host system initiates and controls the entire data communication. There can be two masters, including the primary and secondary ones in the HART loop.The primary master can be a distributed control system (DCS), a programmable logic controller (PLC), or a workstation. The secondary master can include handheld communicators or a laptop/PC. The slave devices can be HART-enabled sensors, actuators, controllers, or transmitters.
- Burst mode: only available in a point-to-point configuration. In this mode, the slave device continuously broadcasts the standard HART reply messages to the master(s).Once a master instructs the slave device to broadcast the messages, the slave keeps sending responses without the need for polling. It stops only when it receives further instructions from the host system. This is why this mode allows for faster data communication with up to 3 or 4 updates per second.
The HART applications
When using the HART protocol, four or more variables can be transmitted in a single message. Multi-variable instruments can take the most advantage of this protocol. In fact, there are now millions of HART-enabled devices that are used in process automation and other industrial applications.
There are also more than 250 member companies of the HART Communication Foundation that have their HART-enabled products in the market. Several of these products are used in DCS and PLC applications.
As the HART uses the older 4-20 mA standard, it has become the de facto standard for data communication for smart-field devices and grid instrumentation. Smart-field devices and sensors use this protocol for communicating device configuration, diagnostic data, device status, device troubleshooting, and measurement values.
The wirelessHART is also widely used in instrumentation and automation. It allows for the communication of sensor data without complex multiplexing and cable installations.
Device descriptions
Generally, host systems use high-level language applications for data communication when using the HART protocol. The protocol is implemented by software on the host device. Since the host system might need to communicate with several different HART devices, the software must “know” the HART commands supported by a particular device.
Similar to how computer peripherals have device drivers written for them to communicate with different computer systems, HART devices have device descriptions (DD).
The device descriptions are written in the HART device description language (DDL) and their source files are submitted by the device manufacturer to HCF for registration in the HCF DD library. After verification, these source files are available for host applications.
The host applications use these DD files to identify common practice and device-specific commands supported by a particular device. By using DDs, the host suppliers need not build custom interfaces and drivers for every different HART device.
The pros and cons
The HART protocol offers many advantages in automation and instrumentation segments. Perhaps the greatest one is that it’s based on the conventional 4-20 mA standard. This reuse of the 4-20 mA wiring not only means the protocol is cost-effective, but it also allows it to have wide acceptance among industrial manufacturers and vendors.
Today, there’s a broad selection of HART products available with compatible host applications and devices. The protocol is highly accurate, reliable and it’s platform-independent — allowing for full-interoperability in a multi-vendor environment. As a hybrid protocol, it’s also the preferred choice for multi-variable instruments. Thanks to its ability to self-diagnosis with quick device configuration, the HART protocol is now commonly used with smart-field devices.
There are some limitations, however. For example, the digital signal in the HART transmission is relatively slow. Also, for a multi-drop configuration, the analog signal is not available and the number of devices that can share the transmission line is limited. These limitations often mean integration with other protocols and standards is necessary.
Leave a Reply