The increasing use of automated driving functions, more sensors and actuators, and growing V2X connectivity is increasing the challenges related to vehicle electric/electronic (E/E) architectures and in-vehicle networking (IVN).
This FAQ will review the performance requirements for microcontrollers (MCUs) needed to support time-sensitive networking (TSN) in IVNs, move over to look at service-oriented gateways, domain controllers, and zonal processors, and closes by returning to TSN with an update on standards and hardware developments.
Vehicle networking implementations are increasingly complex. For example, some systems split processing tasks in real time between cores based on resource availability to more efficiently spread the processing load of the cores. This “mesh network on chip” architecture also supports the dynamic implementation of input/output connectivity for the MCU.
In one study of a multicore MCU, the worst-case response time (WCRT) was measured in a gateway application using 2 and 4 processor cores. The WCRT was below 1 ms when using 2 cores and dropped to less than 300 µs when using 4 cores. In addition to reducing the WCRT, the use of 4 cores almost eliminated interference between the nodes. Another factor taken into consideration was that there is a maximum amount of parallelization that can be implemented before diminishing returns set in. The study concluded that adding more cores would not result in meaningful reductions in WCRT.
That result has important implications for the use of multi-core architectures in automotive time-sensitive networking (TSN) applications. The Avnu Alliance and IEEE802.1DG/D1.4 require a network latency of 500 µs to 1 ms across the different hops in a TSN network. With a WCRT of about 300 µs per hop, after two hops, the IVN end-to-end latency could be unsatisfactory. And the growing need for more bandwidth in multi-GB Ethernet links will only increase the latency problems for automotive TSN. The study identified two limitations in current architectures:
- Current CPUs are not optimized for the real-time performance required for TSN, can’t support the required Gbit/s throughputs, and don’t support the required low latencies.
- Current CPUs lack determinism and lack many of the capabilities needed to align the quality of service (QoS) needs of TNS with the safety requirements of standards like ISO 26262, ISO 21448, and UL 4600.
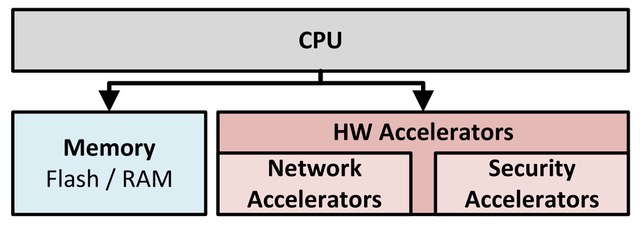
One proposed approach to overcome these limitations is the inclusion of optimized hardware accelerators for specific functions related to networking and security that are both repetitive and time and resource-intensive, freeing up the CPU for more complex processing (Figure 1).
Gateways in the vehicle and to the cloud
Vehicle networking includes an IVN and cloud connectivity. Both require MCUs that can support secure and safe connections. A typical automobile will have over 100 electronic control units (ECUs) connected directly or indirectly to the IVN. To handle that complexity, MCUs may require support for CAN FD, LIN, FlexRay, PCIe, and automotive Ethernet.
Gateways act as central hubs providing isolation and coordinating communications and operation of ECUs across different functional domains like powertrain, chassis, safety, body control, infotainment, telematics, advanced driver assistance systems (ADAS), and more. And for each functional domain, there are MCUs with optimized functionality. The individual performance includes specific requirements for functional safety and cybersecurity. Gateways also support over-the-air (OTA) firmware and software updates for the different ECUs within the car and for the overall system.
The two primary factors when specifying an MCU for a gateway application are the needed level of performance, including processing, memory, and communications, and security. Multicore MCUs are commonly used for most gateway implementations. Those designs require more and more data processing and higher communications throughput. Especially when enabling cloud connectivity, gateways must be able to protect the network from cyber-attacks while supporting real-time connectivity for Internet of Things (IoT) services like car sharing, predictive maintenance, and OTA updates.
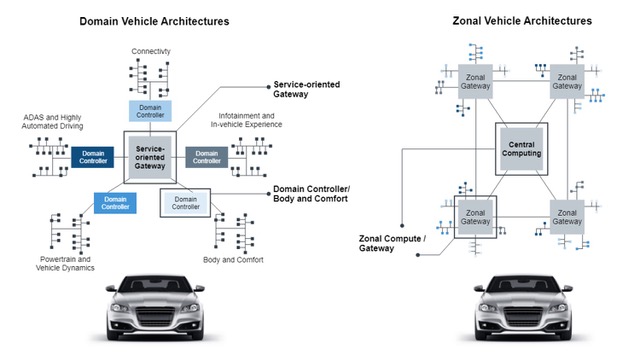
Service-oriented gateways in domain architectures also require more computing power and faster connectivity to support domain controllers for a range of functions like ADAS and automated driving, general connectivity, infotainment, body and comfort, and power train and vehicle dynamics (Figure 2). IVN MCUs typically include a functional safety-core infrastructure with multiple cores and high-level security features, including:
- Up to eight Arm Cortex-A53 processors with one to four cores, each with an L1 memory system and a single shared L2 cache with Arm Neon, an advanced single instruction multiple data (SIMD) architecture extension to speed signal processing for video, machine learning, and computer vision applications, organized in two clusters of up to four cores with optional cluster lockstep
- Up to four Arm Cortex-M7 lockstep cores for real-time applications
- Low-latency communication engine for general automotive network acceleration
- Packet forwarding engine for Ethernet acceleration
- Hardware security engine for secure boot and accelerated security services
- Advanced functional safety hardware and software for ASIL D systems
Firmware over-the-air (FOTA) updates can be especially important in automotive networks. FOTA can be highly targeted to individual ECUs or sent to domains or zones. A FOTA application enables firmware updates to take place in the background without interfering with normal vehicle operation. FOTA is implemented through a dedicated server or gateway that manages firmware updating for the entire vehicle. A FOTA system has three elements:
- FOTA server that manages vehicle and ECU software releases and can customize updates based on OEM requirements and policies.
- FOTA client application that runs on the FOTA server, communicates with the backend server, and updates management software for all ECUs in the vehicle.
- FOTA agent application that runs on individual ECUs and implements the actual firmware update. A FOTA agent is also on the FOTA server to support self-updating.
SoCs for IVNs
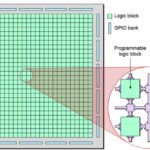
System-on-chip (SoC) implementations can provide high levels of functionality in compact packages. For example, one automotive SoC includes an automotive Ethernet TSN Switch, implemented as programmable logic in an FPGA that allows feature updates to cope with the evolving Ethernet TSN standards (see the following section of this FAQ), up to four 400 MHz four-core CPUs in a dual-core lock-step structure, and 16 MB flash memory. Each core can support multiple software systems with varying ISO 26262 functional safety levels and operate independently.
The MCU also includes security functions fulfilling E-safety Vehicle Intrusion Protected Applications (EVITA) Full for enhanced protection against cyber-attacks and enabling the device to support safe and rapid Full No-Wait OTA software updates to address evolving security needs. This SoC also includes integrated power management ICs that provide ISO 26262-compliant power supplies. Extensive connectivity includes:
- TSN Ethernet
- 5 x 1 Gbps
- 1 x 100 Mbps
- 19 CAN-FD channels
- FlexRay
- 10 LIN channels
- MOST150
- HDMI / Audio
- 3 USB 2.0 ports
- Wi-Fi
Coming soon: automotive TSN
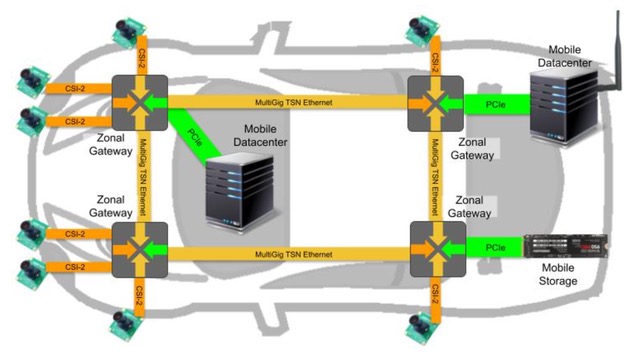
TSN is still just a goal for automotive Ethernet communications. But the goal is getting closer. On 29 May 2023, the second draft of P802.1DG – TSN Profile for Automotive In-Vehicle Ethernet Communications went out for review and comment. The draft standard is intended to address the lack of automotive TSN profiles and address issues related to interoperability and connectivity for automotive applications on converged networks. The profiles are designed to support all automotive TSN performance requirements, including high availability and reliability, security, bounded latency, and maintainability. Automotive TSN is designed to work in zonal architectures and provide connectivity to one or more mobile data centers and mobile storage systems (Figure 3). Some of its benefits include:
- Reduced cost for vehicle networking and wiring harnesses
- Lower CPU loading
- Ability to be implemented with ASICs and FPGAs in addition to MCUs
- Highly deterministic with transport latencies as low as 5 µs
Summary
Automotive networking MCUs are evolving and increasing in performance to support advanced IVN needs, including TSN Ethernet, in addition to the numerous existing automotive networking protocols. Important factors when specifying an MCU for an IVN application include performance, encompassing processing, memory, and communications, as well as security, particularly real-time FOTA capability. For space-constrained applications, SoCs are available that combine extensive processing, security, connectivity, and power management functions.
References
A Perspective on Ethernet in Automotive Communications—Current Status and Future Trends, MDPI applied sciences
Auto / TSN for In-vehicle Networking, Missing Link Electronics
Automotive Gateway & Domain Control, Renesas
Avnu Alliance
Processing the advantages of zone architecture in automotive, Texas Instruments