
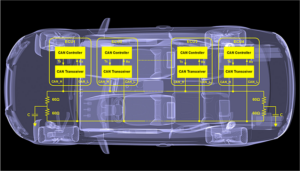
The controller area network (CAN) bus was developed to support the networking of large numbers of electronic control units (ECUs) in automobiles. CAN is implemented using unshielded twisted pair (UTP) cabling, designed for reliability in electromagnetically noisy environments. CAN has evolved significantly since it was first introduced in 1986, along with early ECUs. Today, there […]
automotive
What is the onboard diagnostics system, OBDII?
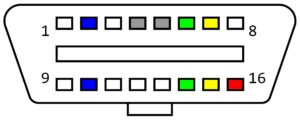
OBDII is the second-generation onboard diagnostic (OBD) interface. The first generation of OBD coincided with the advent of onboard computers in vehicles. Initial OBD systems were intended to provide technicians with information on the status of various vehicle systems, with an indicator light on the dash to alert drivers of a malfunction. OBDII includes more […]
How is the MOST bus optimized for the automotive industry?
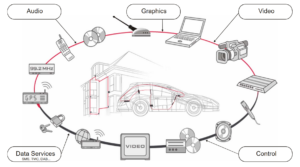
The media-oriented systems transport (MOST) bus was initially intended for implementation on optical fiber to support high bit rates, but fiber and copper transport layers are currently defined. MOST provides a solution for automotive peripherals like radios, CD and DVD players, GPS navigation systems, and infotainment electronic control units (ECUs). This FAQ describes the MOST […]
What is the FlexRay communications network?
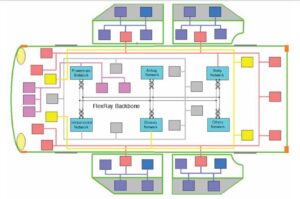
FlexRay is an ISO-standardized, deterministic, fault-tolerant, high-speed communications bus with applications in steer-by-wire, drive-by-wire, brake-by-wire, adaptive cruise control, active suspension, and other safety and drivetrain control systems. This FAQ offers a top-level comparison of FlexRay with the controller area network (CAN) and local interconnect network (LIN) buses, details the FlexRay communications cycle, and reviews FlexRay […]