
By Mikko Savolainen, Senior Manager, Industrial and Commercial IoT Products, Silicon Labs
Since opening the Global Positioning System (GPS) for civilian use in the 1980s, GPS technology has become a mainstream and de facto solution for outdoor positioning and asset tracking, finding its way first from commercial airplanes to smartphones and smartwatches to match-box-sized GPS trackers. However, until recently, we haven’t seen an equivalent mainstream technology alternative to GPS for indoor asset tracking and positioning, although many attempts exist. The advent of Bluetooth direction-finding technology is now changing the landscape of indoor asset tracking and positioning applications and potentially driving mainstream adoption.
Many attempts to solve the RF-based indoor positioning and asset tracking challenges have been tried using technologies such as Ultra-Wide Band (UWB), Wi-Fi, or Bluetooth Received Signal Strength Indicator (RSSI)-based solutions. While these RF technologies can solve the challenge to a certain extent, they all have unique limitations, making them less than ideal options for indoor asset tracking.
UWB is probably the most widely used technology for indoor location applications. While it is known to deliver extremely good accuracy down to centimeters, the challenge with UWB is that it has not become a mainstream technology, which has kept IC and module prices high and limited the widespread use of the technology. In addition, the high power consumption of UWB radios limits the battery life of asset tags and increases the bill of materials (BOM) or maintenance cost for the tags.
Wi-Fi is another technology that has been used for RF-based indoor location services. While Wi-Fi offers the advantage of ubiquitous infrastructure, especially in retail and commercial spaces, to provide Internet access to laptops, smartphones, and other terminals, the RSSI-based positioning does not deliver high accuracy — typically limited to 5-10 meter accuracy. In addition, Wi-Fi primarily targets high-speed wireless data transfer, and it’s challenging to create low-cost, low-power Wi-Fi tags.
Since the introduction of Bluetooth Low Energy (LE) technology and beaconing standards such as Apple iBeacon and Google EddyStone, multiple attempts have been made to use Bluetooth LE for indoor location services. Bluetooth has the benefit of being a widespread, mainstream, and very low power technology. Low-cost asset tags or beacons can be built with Bluetooth, and they can easily provide a 5- to 10-year battery life even with coin cell batteries. Bluetooth LE is also widely adopted in smartphones and tablets, enabling these devices to detect assets. While there are successful large-scale deployments of Bluetooth beacon-based indoor location solutions, beaconing-based solutions also use RSSI-based positioning technology and have similar accuracy limitations as Wi-Fi RSSI-based solutions. There is also the need for Bluetooth-based infrastructure deployment.
Understanding Bluetooth direction finding technology
Bluetooth direction finding was introduced as part of the Bluetooth Core Specification 5.1 specification in January 2019. The purpose of direction finding technology is to enhance the positioning capabilities of Bluetooth technology by being able to detect the direction of the incoming Bluetooth signal instead of relying on simple transmit (TX) power and RSSI based mechanisms.
The core of the direction finding specification relies on two methods called the angle of arrival (AoA) (see Figure 1), and angle of departure (AoD). Both methods rely on at least one of the Bluetooth devices having an array of antennas and being able to receive or transmit the Bluetooth signal while shifting between the different antennas.
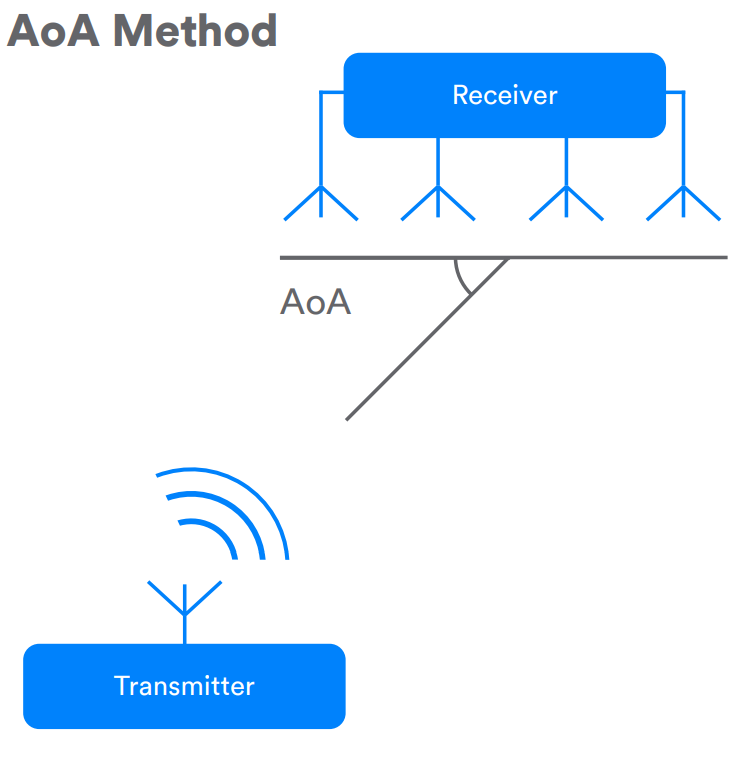
Figure 1. Angle-of-Arrival operation
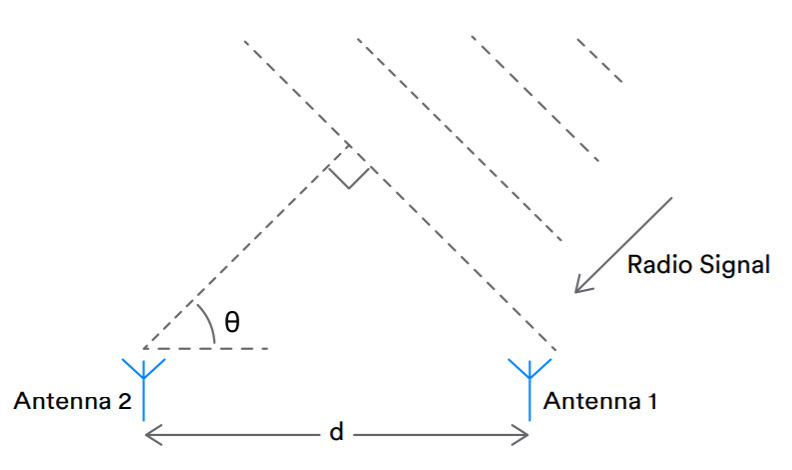
With the AoA method, the next key step is to be able to measure and detect the Bluetooth signal phase differences (see Figure 2) between the different receiving antennas and then calculating the angle of the arriving signal from that information as well the known distance between the different antennas.
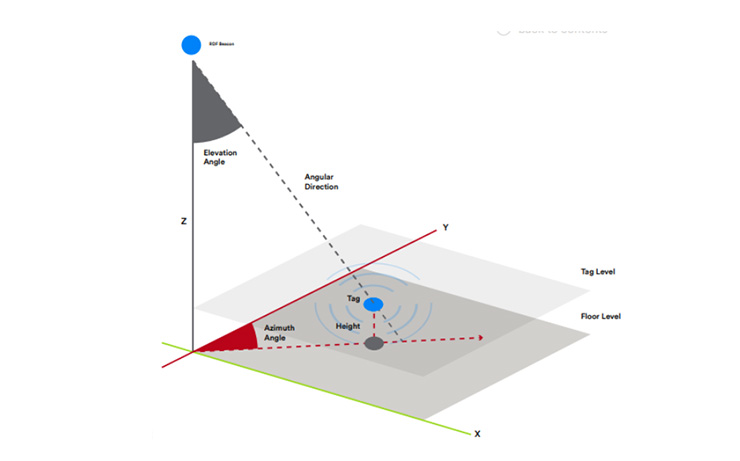
The AoA, as well as AoD technology, only provides a relative azimuth and/or elevation data between the transmitting and the receiving devices, and additional information is needed to compute the absolute X, Y and Z coordinates of the Bluetooth asset tag. Figure 3 shows a mechanism for achieving this capability. In this example, the receiver coordinates and orientation are known, and the AoA method is used to derive the azimuth and elevation data from the Bluetooth asset tag.
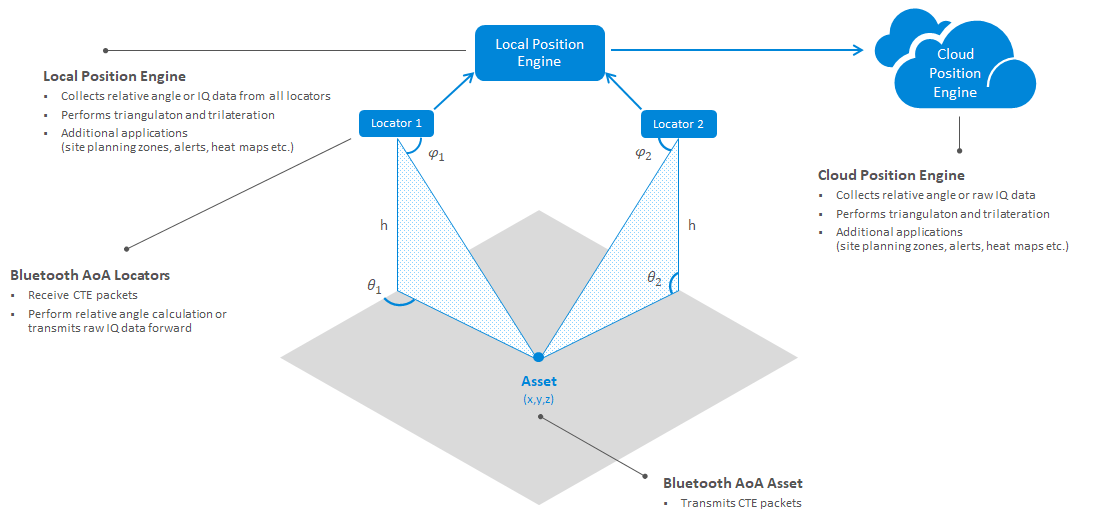
There are other ways to compute the X, Y, and Z coordinates of the tracked device, such as using multiple receivers to detect the signal transmitted by the asset tag and then using triangulation or trilateration to compute the location of the assets.
State of Bluetooth direction finding technology
It’s one thing to have specifications and standards available but another issue to have working technology ready to be deployed for real-life applications. Let’s take a close look at state of the art for Bluetooth direction finding technology available today.
System architecture
A typical indoor positioning solution consists of at least three components: the tracked assets, the infrastructure needed to discover and track the assets, and a back-end system that is usually responsible for advanced position logic and management of the assets and/or the infrastructure.
Assets
The easiest piece of the puzzle to solve is the assets. Bluetooth LE technology has reached a maturity point where Bluetooth radios are power efficient enough to run 5-10 years on coin cell batteries and enable dedicated asset tags to be built at a reasonably low cost. Wireless devices such as the Silicon Labs EFR32BG22 SoC also support the Bluetooth 5.1 standard and AoA and AoD technology.
Another interesting aspect with Bluetooth LE is that it is already integrated into many assets like medical equipment and power tools for smartphone connectivity and data transfer purposes and can enable turning on tracking on these devices at no extra hardware cost.
A more complex but mandatory piece of the puzzle is the tracking infrastructure. The asset tracking infrastructure requires the use of antenna arrays, AoA technology, and Bluetooth 5.1 compatible Bluetooth radios. As the Bluetooth 5.1 standard has only been available since January 2019, these devices are still not mainstream or widely available. However, the early adopters of this technology, such as Quuppa, already have AoA compatible infrastructure available, including Quuppa’s Q17 Bluetooth locator.
Bluetooth has also already found its way into commercial Wi-Fi access points and RSSI-based tracking solutions such as the Cisco Meraki MR53. These solutions are available at a relatively low incremental cost of RF switching and antenna arrays, and these devices could become Bluetooth AoA capable.
Infrastructure device vendors are implementing Bluetooth AoA technology into their products. For example, Silicon Labs has developed a Bluetooth 5.1 AoA reference design with a 4×4 antenna array matrix capable of receiving AoA transmissions from the tags and detecting azimuth and elevation down to a few degrees of accuracy.
Positioning and management engines
The last crucial component in any indoor location solution is the position and/or management engine responsible for computing and maintaining the location and status of the assets. Although there are multiple vendors with different position engine solutions using various technologies, only a few support Bluetooth AoA technology today due to the technology being relatively new. The most mature solution may be the QPE position engine provided by Quuppa. The QPE engine not only provides the X, Y, and Z coordinates of the tracked assets, but it can also collect and expose IoT data from the tags as well as provide a feedback channel back to the tags enabling asset tracking and two-way data transfer.
Conclusions
With direction finding technology, Bluetooth can enable accurate and affordable indoor asset tracking and positioning applications to become a mainstream solution over the next decade, similar to how opening up GPS infrastructure enabled outdoor tracking and positioning.
Bluetooth LE technology has reached a level of maturity at which the price points of Bluetooth radios make it commercially feasible to integrate Bluetooth into even disposable devices while providing a 5- to 10-year battery life on typical coin cell batteries.
The AoA infrastructure still needs to be developed and deployed further. Still, early adopters such as Quuppa already have solutions available, and Bluetooth has also found its way into commercial Wi-Fi infrastructure, such as Cisco’s Meraki devices. Leading silicon and software vendors are providing the mission-critical building blocks to help the infrastructure vendors implement and deploy the technology. The first AoA-capable position engines, including the Quuppa QPE, are already available in the market, and it is only a matter of time when such solutions will become widely available from multiple vendors.
About the author
 Mikko Savolainen is a Senior Product Manager at Silicon Labs, where he is responsible for the marketing of Silicon Labs’ commercial lighting, indoor positioning, asset tracking and clinical medical solutions. Mikko joined Silicon Labs in February 2015 after the company’s acquisition of Bluegiga Technologies, a Finnish Bluetooth and Wi-Fi module and stack manufacturer. Before joining Silicon Labs, Mikko worked in various management positions at Bluegiga focused on marketing, product management and customer service operations. Mikko has a M.Sc. degree in engineering from the Aalto University in Espoo, Finland.
Mikko Savolainen is a Senior Product Manager at Silicon Labs, where he is responsible for the marketing of Silicon Labs’ commercial lighting, indoor positioning, asset tracking and clinical medical solutions. Mikko joined Silicon Labs in February 2015 after the company’s acquisition of Bluegiga Technologies, a Finnish Bluetooth and Wi-Fi module and stack manufacturer. Before joining Silicon Labs, Mikko worked in various management positions at Bluegiga focused on marketing, product management and customer service operations. Mikko has a M.Sc. degree in engineering from the Aalto University in Espoo, Finland.
What is the maximum value of “d” that can be used?
Is it necessary that we need to use an antenna Array placed very close proximity to each other Or it is could still work if 2 or 3 Bluetooth radio devices be separated 30cm apart?