 Drako Tech has announced DriveOS with HyperSafety™, described as a single-ECU automotive platform intended to consolidate multiple vehicle software domains onto one compute unit. The company states the platform is designed to run safety-critical control functions alongside ADAS, cockpit, and infotainment workloads while maintaining hard real-time behavior and mixed-criticality isolation.
Drako Tech has announced DriveOS with HyperSafety™, described as a single-ECU automotive platform intended to consolidate multiple vehicle software domains onto one compute unit. The company states the platform is designed to run safety-critical control functions alongside ADAS, cockpit, and infotainment workloads while maintaining hard real-time behavior and mixed-criticality isolation.
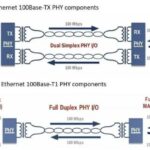
DriveOS is positioned as a Linux-based system that adds hard real-time capabilities without requiring kernel changes, allowing developers to use common Linux libraries and tooling while targeting deterministic execution for vehicle control. The platform is presented as supporting internal communication between software partitions and providing an automotive networking and control backbone intended to reduce latency compared to multi-ECU approaches.
HyperSafety is described as a multi-layer safety approach that combines hardware-backed isolation with redundancy and failover. The platform’s separation kernel is intended to prevent faults or cybersecurity events in non-critical domains from propagating into safety-critical control domains. The architecture also includes continuous monitoring of internal communication flows to detect and block erroneous behavior.
Drako Tech also describes a set of development and deployment components built around DriveOS. These include a control-systems environment intended to integrate with Simulink-based workflows, a configurable digital cockpit software stack supporting multi-display operation, and an ADAS development environment intended to support low-latency control and standard AI platforms.
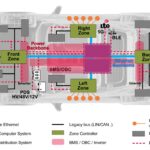
The company frames the platform as addressing integration and reuse challenges associated with distributed multi-ECU vehicle electronics, where numerous body, powertrain, safety, and sensor subsystems require separate controllers and network integration. DriveOS is described as combining mixed-criticality execution with a unified electronics approach intended to simplify connectivity, device control, and power distribution across vehicle domains. A reported performance figure is 108 microseconds end-to-end real-time response compared to 514 microseconds cited for TSN automotive Ethernet.
Additional information is available at https://drakotech.ai.


Leave a Reply