Technologies behind multigigabit Ethernet and 5G could transform transportation.
Harsh Patel | Molex
The connected vehicle segments are growing at a rapid pace. By 2020, industry analysts predict there will be 250 million connected vehicles and 10 million self-driving cars on the road, and 470 million connected/autonomous vehicles by 2025.
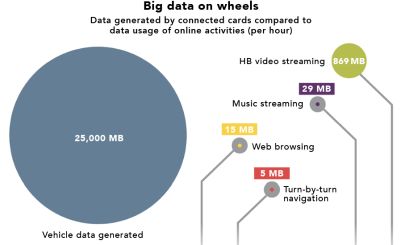
As the number of connected cars rises, so too will the extent to which they produce, transmit and receive data. McKinsey & Company says the amount of data transmitted through a connected vehicle (and to and from the cloud) is approximately 25 GB of data/hr and predicts this figure will rise to nearly 500 GB of data/hr once vehicles are truly autonomous.
Today’s in-vehicle networks actually use a combination of several different data networking protocols. Some of these have been around for decades. Among them are the controller area network (CAN), which handles powertrain and actuator functions; the local interconnect network (LIN), predominantly handling non-time-sensitive apps such as climate control, ambient lighting, seat adjustments, and so forth; media oriented system transport (MOST) for infotainment; and FlexRay for anti-lock braking, electronic power steering, and vehicle stability functions.
One result of using different protocols is that vehicle networks must incorporate gateways to transfer data within the infrastructure. This practice is not optimum on several levels, one being that the wiring for each network adds weight to the vehicle. Wire harnesses are the third heaviest element of the typical vehicle (only the engine and chassis are heavier).
Automotive networks today also incorporate numerous electronic control units (ECUs), and the number of ECUs in the typical vehicle is also rising. It’s not uncommon for luxury models to carry 150 ECUs, and ordinary vehicles might have up to 90 ECUs.
Automotive designers have concluded that data-intensive applications emerging to support advanced driver assistance system (ADAS) can’t be handled with the kind of automotive networking technology in use today. The entire approach for in-vehicle networking must fundamentally change, both in terms of the topology and with regard to the underlying networking technology.
Today, the networking structure used in vehicles is moving toward a variant of what is called a domain-based architecture (each automaker has its own architecture, but the main concept is often similar). Where older vehicle networks had application-specific ECUs and application-specific bus systems, domain architectures are characterized by different domains for each key function: one ECU and network handling body control, one ECU/network for infotainment, one for telematics, one for powertrain, and so on. At least for now, often these domains still employ a mix of different network protocols (CAN, LIN and so forth).
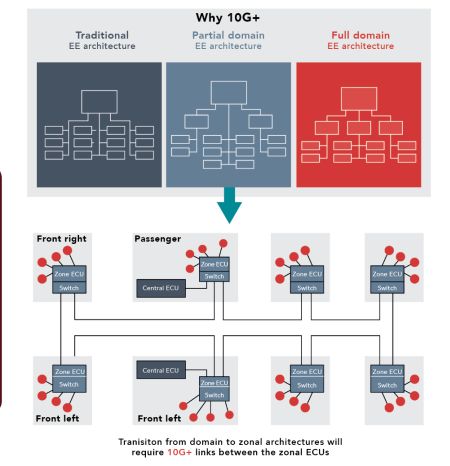
As networks become more complex, this domain-based approach becomes less efficient. So there will be a migration away from the domain-based architectures toward a type called a zonal architecture.
A zonal architecture connects data from different traditional domains to the same ECU, based on the ECU’s location (zone) in the vehicle. This scheme greatly reduces the amount of wire harnessing partly because many functions now handled with discrete wiring will move to Ethernet technology.
Unlike other in-vehicle networking protocols, Ethernet has a well-defined development roadmap for reaching higher speeds. In contrast, traditional automotive protocols like CAN and LIN are at a point where planned applications exceed their capabilities with no clear upgrade path to solve the problem.
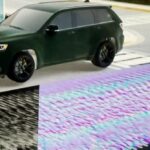
Expectations are that most data transfer within vehicles will be via Ethernet. Thus the plan is for a single homogeneous network throughout the vehicle. This in-vehicle network will be scalable such that it will be able to handle functions demanding higher speeds (10G for example) with ultra-low latency but also able to handle slower functions. Designers will select the Ethernet physical layer (PHY) for specific functions according to bandwidth demands. So data-rich image sensors such as radar and lidar might employ a 1 Gbps interface where low-data rate sensors might need only a 10 Mbps connection.
Zonal architectures will employ Ethernet switches to manage data for all the different domain activities. Different data domains will connect to local switches, and the Ethernet backbone would then aggregate the data. In this way, the network can use the same core protocols to support the use of different speeds.
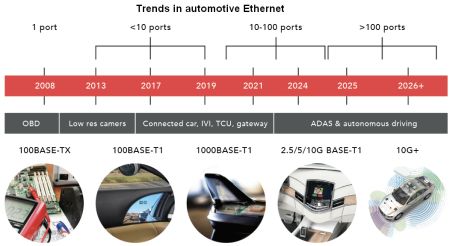
The trend toward vehicle networking has led to efforts aimed at standardizing automotive Ethernet. The automotive Ethernet specification currently in development is IEEE 802.3CH for high-speed automotive Ethernet applications (Multi-Gig Automotive Ethernet at 2.5G, 5G, and 10G) over 15 m with optional PoDL (power over data lines). The first version of this standard is due out by the end of this year.
IEEE has also chartered a study group under the 802.3 Ethernet working group for greater than 10Gbps automotive Ethernet. This is a relatively recent development and it likely will be some time before any standard for 10 Gbps Ethernet emerges.
Another trend affecting connected vehicles is the move to 5G. Major telecom carriers have begun activating fifth-generation (5G) wireless networks in metropolitan areas. The advent of 5G wireless data could take intelligent and autonomous driving to the next level by enabling both faster data rates and secure vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2X) connectivity. Slated for widespread adoption within a few years, 5G will require continued progress in the development of powerful network infrastructure and in-vehicle processing technologies to assure reliable signal speed with ultra-low latency bandwidth.
To explain what 5G might mean for automotive connectivity, it might be useful to cite real examples of 5G capabilities that are now in the prototype phase. One such project is AutoAir which is being tested at the Millbrook Proving Ground in the UK. Researchers there set up base stations, antennas, and other hardware to produce scenarios that include maintaining a 1 Gbps connection to vehicles speeding at up to 160 mph.
Another 5G implementation called Invisible-to-Visible was described at CES 2019 by Nissan. It uses fast connectivity to see around corners and alert passengers to potential hazards such obstacles in the road or pedestrians obscured by vehicles. In a similar vein, Ford Motor is working with Vodafone on a system that uses 5G to warn cars about approaching emergency vehicles.
These high-speed automotive solutions demand a level of expertise and engineering that exceeds that of many other applications. Much of the design complexity comes from the push to realize better performance in connectors, cable assemblies, and modules that have small footprints. It’s no longer enough for connection hardware to be characterized by simple parameters such as contact resistance and corrosion resistance. Hardware that handles high-speed data must address shielding against electromagnetic interference and must be characterized in terms of attenuation, return loss, mode conversion, crosstalk, impedance, and other issues that can impact signal transmission. Much goes into specifying connectors having the ability to reliably deliver high-speed, high-bandwidth and high-power signals to and from every sensor in a vehicle.
As a result, automakers are asking suppliers to create solutions for the short term that can be implemented with existing infrastructure but can evolve into solutions for the demands of tomorrow. Suppliers are working hard to meet—and expand—high-speed data capabilities to satisfy the requirements of automakers working toward higher levels of connectivity, including V2V, V2X, and full autonomous driving.
References


Leave a Reply