Robots are being used to implement logistics tasks, industrial processes, personal care, medical procedures, and more. The growing variety of robot designs and the breadth of tasks that robots perform is driving a large number of specific performance and safety standards. This FAQ reviews emerging standards for industrial mobile robots, collaborative robots (also called ‘cobots’), and medical robots. It will also look into the implications of “OSHA for robots.”
Industrial mobile robots are one of the fastest-growing segments in the area of industrial automation. The Robotic Industries Association (RIA), part of the Association for Advancing Automation (A3), has published the first national safety standard for industrial mobile robots. ANSI/RIA R15.08-1-2020 – “American National Standard for Industrial Mobile Robots – Safety Requirements – Part 1: Requirements for the Industrial Mobile Robot” provides technical requirements for industrial mobile design robots to support the safety of people who work near them.

R15.08 Part 1 is considered to be a first step in the development of mobile robot safety requirements. It is focused on industrial environments where the general public does not have unrestricted access. According to the RIA, additional considerations will be needed for the public’s safety in non-industrial environments, such as retail, and this is one example of a subject that could be covered in future work. While makers of mobile robots are the primary audience for R15.08 Part 1, mobile robot integrators and users are also expected to find the requirements useful.
The R15.08 Committee has already begun working on R15.08 Part 2, which will cover safety requirements for deploying industrial mobile robots or mobile robot fleets into the specific site where they will be used. R15.08 Part 3, to be started upon completion of the Part 2 efforts, will provide safety requirements for users of industrial mobile robots and mobile robot fleets.
Cobot standards emerging
Robot safety regulations and standards have generally excluded operator access to the workspace. In contrast, the robot is active, precluding any operations that would benefit from human intervention while the robot is working. The development of collaborative robots (cobots) will combine robots’ repetitive performance capabilities with the individual skills and flexibility of people. People excel at solving imprecise problems, while robots excel at precision, endurance, and power.
Technical specifications are being developed for cobot operation where a robot and one or more people share the same workspace. Of particular concern is the integrity of the cobot’s safety-related control, especially as reflated to operational parameters such as speed and force. An important aspect of these technical specifications will be the requirement to assess the robot and the workspace environment. The combination of robots and humans can also result in ergonomic benefits, such as improvements in worker posture, which could reduce a variety of injuries. The collaborative operations described in the Technical Specification are dependent upon the use of robots meeting the requirements of ISO 10218-1 and their integration meeting ISO 10218-2.
The content in ISO Technical Standard 15066:2016 and RIA Technical Report 15.606-2016 are basically the same and details the requirements and information surrounding safe, collaborative robots. TS 15066 is normative (detailing the steps required for conformance to the standard), while TS 15.606 is informative (providing information and methods that can be used for standard compliance). Both describe the four collaborative techniques used to reduce risks to human workers: safety-rated monitor stops, hand guiding, speed, and separation monitoring, and power force limiting (PFL) systems.
It is expected that ISO TS 15066 and RIA TR 15.606 are used in conjunction with RIA TR R15.806-2018, which describes a method for testing forces exerted by a pressure force limiting system. Additional physical safeguards may be required if a risk assessment reveals a need for them. Sensor systems are required for standard compliance for speed and separation monitoring. For PFL systems and safety-rated monitor stops, safeguarding is a requirement for high-speed and high-risk operations.
ISO standard 10218-2011, which covers safety requirements for industrial robots and robot systems, is being updated. The updated document is expected to be released in late 2021. The related United States standard, R15.06-2012, is a direct adoption of ISO 10218-2011 and is expected to be published in the last half of 2022.
OSHA for robots
The Occupational Safety and Health Administration (OSHA) is part of the U.S. Department of Labor. OSHA inspections of robot installations can occur at any time without prior notification. During inspections of robotic installations, the agency concentrates on machine guarding (1910.212) and lock-out/tag-out (1910.147) systems.
To satisfy OSHA requirements, at least one method of machine guarding must be included to protect people in the vicinity of the robot. The OSHA requirements are extensive and include guarding against hazards such as those created by points of operation, ingoing nip points, rotating parts, flying chips, sparks, and so on.
Robots are considered machines under OSHA guidelines, but cobots do not fall under the same rules. Cobots don’t require guarding as long as they meet other requirements for safety-rated monitored stops, power and force limiting, and speed and separation monitoring and control. Also, OSHA considers each workspace separately. In addition to the requirements for the robots themselves, workspaces can have different ceiling heights, wall distances, and other factors that impact operator safety.
Medical robots
Medical robots must meet IEC 60601-1, which includes requirements for basic safety and essential performance. Basic safety requirements are protection from shock, fires, high temperatures, radiation exposure, electromagnetic interference, and mechanical hazards. Robots must also meet essential performance requirements as determined with an application specific risk assessment.
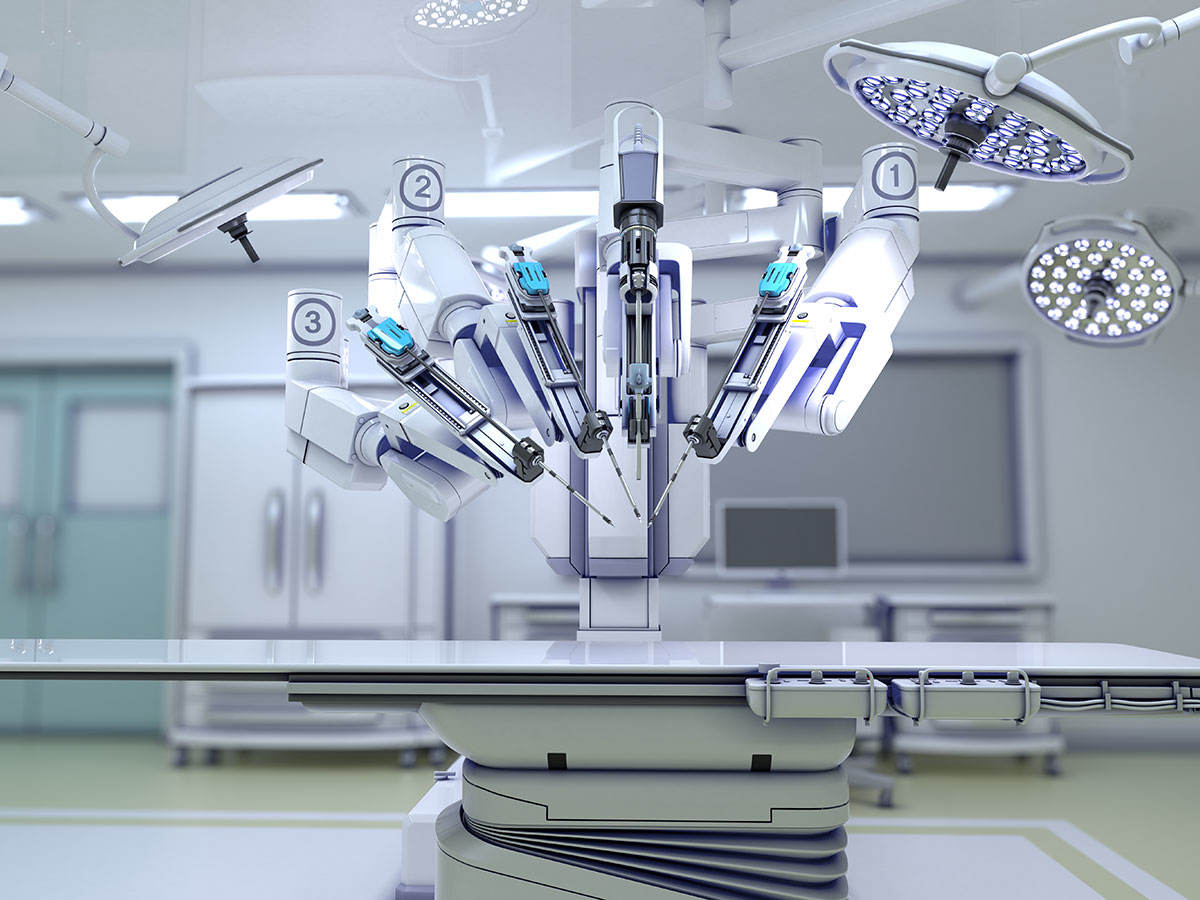
IEC80601-2-77 defines additional requirements for robotically assisted surgical equipment and IEC80601-2-78 for medical robots used for rehabilitation, assessment compensation, or alleviation. Parameters such as precision of motion control and the force and torque of motion are considered essential performance parameters. Risk assessments by makers of medical robots are expected to include everything that could result in the loss of essential performance, such as the breakdown of hardware, software, and hazards related to usability, including misuse of the system.
Robot design reviews
As is true for all system design efforts, a thorough design review early in the development process for medical and industrial robots is important. If a regulatory review is not performed until after the product design is completed, major design adjustments can result in higher costs and a delay in getting to market. A regulatory design review for medical robots should consider:
- ISO 14971 risk management process, which can be very complex when a product has multiple subsystems.
- Operator and patient isolation issues, which lead to costly re-designs.
- Critical component identification and review for proper ratings and regulatory compliance.
- ISO 13482:2014 – Robots and robotic devices — Safety requirements for personal care robots
- Identification of all applicable standards and testing that need to be performed. Some robots are used in conjunction with other medical equipment that can affect the robot design. High-frequency surgery and endoscopic equipment are examples that can have a direct impact on the isolation strategy, component selection, and testing that will need to be performed.
- A review of the electromagnetic radiation and immunity test plan as required by IEC60601-1-2 is important. This test plan is required to consider all the applicable standards, procedures to monitor essential performance during testing, and the different configurations of the product to be tested. The addition of wireless communication makes this plan more complex.
In addition to the medical-robot-specific considerations described above, numerous safety and performance standards apply to robots in general. The design review process should include confirming robot compliance to these safety considerations and international regulations, as applicable in each design:
- UL 3100, Outline of Investigation for Automated Mobile Platforms (AMPs)
- American National Standards Institutes (ANSI)/UL 1740, Standard for Robots and Robotic Equipment
- ANSI/Robotic Industries Association (RIA) R15.06
- CAN/Canadian Standards Association (CSA) Z434
- International Organization for Standardization (ISO) 10218
- International Electrotechnical Commission (IEC) 61508
- IEC 62061 – Safety of machinery: Functional safety of electrical, electronic, and programmable electronic control systems
Robotics is a rapidly growing and evolving field. Previous FAQs in this series have reviewed “Robot axes of motion, safety and power architectures,” “Robot software environments and motion control architectures,” and “Sentient robots and artificial intelligence.”
References
Collaborative Robot Safety, Underwriters Laboratories
Global robotics standards, Robotic Industries Association
Industrial Robots and Robot System Safety, Occupational Health and Safety Administration
Safety Standards in Healthcare Robotics, Underwriters Laboratories




Leave a Reply