
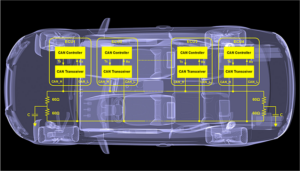
The controller area network (CAN) bus was developed to support the networking of large numbers of electronic control units (ECUs) in automobiles. CAN is implemented using unshielded twisted pair (UTP) cabling, designed for reliability in electromagnetically noisy environments. CAN has evolved significantly since it was first introduced in 1986, along with early ECUs. Today, there […]
FAQ
What is the onboard diagnostics system, OBDII?
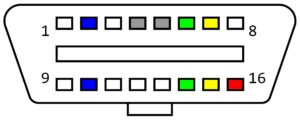
OBDII is the second-generation onboard diagnostic (OBD) interface. The first generation of OBD coincided with the advent of onboard computers in vehicles. Initial OBD systems were intended to provide technicians with information on the status of various vehicle systems, with an indicator light on the dash to alert drivers of a malfunction. OBDII includes more […]
What is the ideal Ethernet choice for automotive applications?
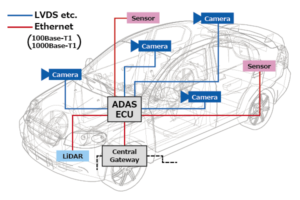
Ethernet is gaining popularity in several automotive applications. It can handle high data rates with lower latency and lesser weight than controller area network (CAN) and local interconnect network (LIN) buses. However, conventional Ethernet developed for information technology (IT) infrastructure applications is too sensitive to interference and too noisy for most automotive applications. This article […]
What is the local interconnect network (LIN) bus?
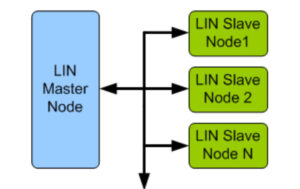
The local interconnect network (LIN) bus is a single-wire bus (using the chassis ground) that enables the inexpensive integration of sensors and actuators in automobile networks. It can be used to create small subnets and can communicate over a power distribution system with a DC-LIN transceiver. This FAQ reviews the basics of LIN networks, details […]
Finding the correct LiDAR application

The automotive ADAS designers tout the up-and-coming LiDAR detection technology, coupled with mmWave radar and the camera, to support autonomous vehicle design further. But that is not the complete LiDAR story. The automotive ADAS designers tout the up-and-coming LiDAR detection technology, coupled with mmWave radar and the camera, to support autonomous vehicle design further. But […]
What are basic logic gates?
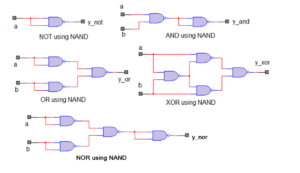
Logic gates are the building blocks of digital circuits. The basic logic gates include AND, OR, NOT, NAND, NOR, XOR, and XNOR. They can be implemented in digital hardware using transistors and/or diodes. In a few applications, they are implemented using electromechanical relays, fluidics, pneumatics, or optical elements. A series of logic gates can be […]
Security standards and MCUs

Security is an important concern for developers of all types of systems. This FAQ reviews several important security standards for IoT cyber security, security vulnerabilities in industrial automation and control systems, standards for analyzing and identifying secure coding errors in C applications, and concepts of application software security and levels of trust. The European Telecommunications […]
What’s a Neural microcontroller?
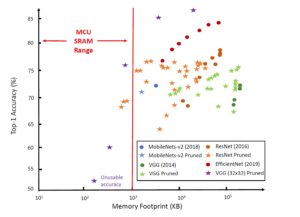
The ability to run neural networks (NNs) on MCUs is growing in importance to support artificial intelligence (AI) and machine learning (ML) in the Internet of Things (IoT) nodes and other embedded edge applications. Unfortunately, running NNs on MCUs is challenging due to the relatively small memory capacities of most MCUs. This FAQ details the […]
What happens when an MCU powers up?
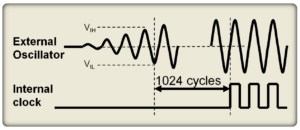
MCU start up is a highly structured process designed to ensure proper operation. Numerous elements are involved including initial power/voltage sequencing and regulation, oscillator startup, the use of a vector table, boot loaders (including possible secure boot), and application initialization. This FAQ walks step-by-step through the various elements involved during the start-up of an MCU. […]
MCU Bits and Bytes: sizes, types, and uses
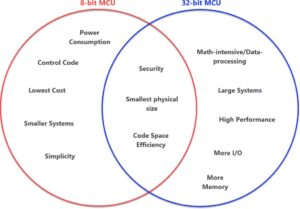
Bits are the 1s and 0s that form the basis of digital information. A group of 8 bits is a byte and forms the basis of digital computing. Bits and bytes are used for storing and processing information as well as other functions in a digital IC. This FAQ begins with a brief review of […]